Rezinoviy_Ded
-
Постов
23 -
Зарегистрирован
-
Посещение
Достижения Rezinoviy_Ded
")
Newbie (1/14)
7
Репутация
-
 Это называется "вкусовщина", не имеющая ничего общего с перечисленным. Для кого-то эстетика - это чёрная коробка, болтающаяся на проводе под столом. Практичнее? Ну ну. Так себе аргумент. Вкусовщина.
Это называется "вкусовщина", не имеющая ничего общего с перечисленным. Для кого-то эстетика - это чёрная коробка, болтающаяся на проводе под столом. Практичнее? Ну ну. Так себе аргумент. Вкусовщина. -
Просто потому что @Sieben так сказал, его нужно вытащить! Чё, не понимашь что ли? XD Какая разница зачем. Не задавай вопросов, просто делай!
-
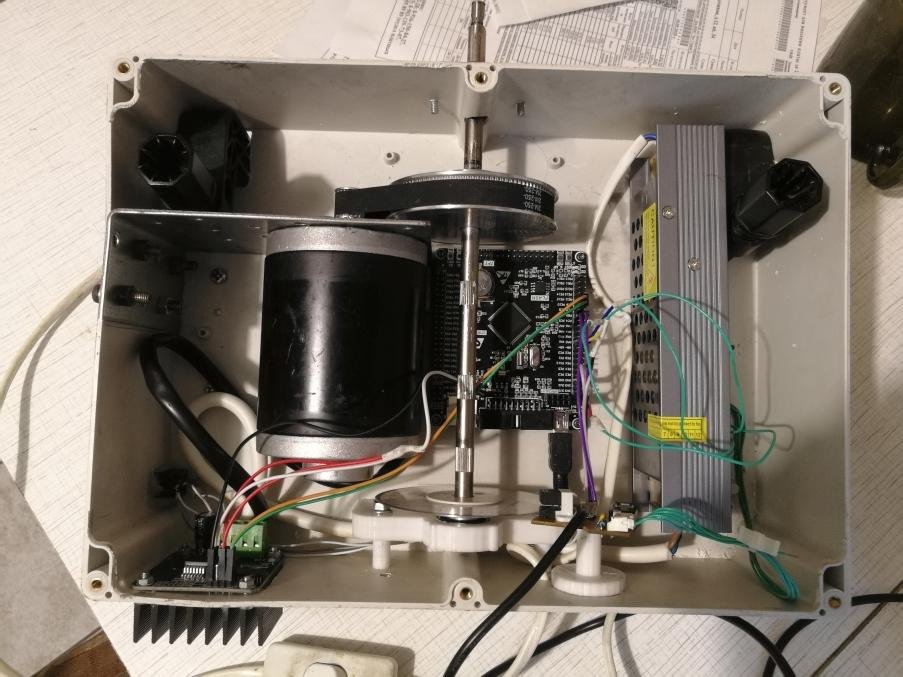
Проблема решена! Колечко и по два витка каждого сигнального провода Слава ферриту, чудесному радиоматериалу! Хорошо я помню про него. Уже тестирую wheelcheck'ом. Ну и дурь. Если этот мотор раньше взрослого человека на самокате таскал... Но отступать уже поздно)) На распечатанных опорах стоит как влитой. Корпус как будто был придуман для моих издевательств, спасибо китайскому заводу герметичных ящиков. И так. В Т500RS стоит 65 ваттный мотор, и он считается очень мощной базой. Чего уж про мои 100 говорить. Так что пожалуй на всю использовать я его не буду, смысла нет, это ж не станок какой-нибудь. Но пару раз запустить в цикле и посмотреть как вращается в режиме "Максимум пауа" надо, дабы убедиться в прочности соединений. "Больше скорость - меньше ям!" жаль не помню кто сказал...
-
Надо попробовать две вещи: заменить двухжильный провод на трёхжильный с евровилкой и заземлением, надеть на провода энкодера ферритовое кольцо. Пока что ни того ни другого нет.
-
И так, есть определённые выводы. Я догадываюсь в чём дело, но по порядку: Если выключен БП, то с энкодера можно получить показания. Т.е. энкодер однозначно исправен и правильно подключен. Если отключить драйвер мотора от платы (т.е. совсем), включить БП и посмотреть показания с энкодера я снова увижу "убегающие" в любую сторону показания. Отсюда вывод. Драйвер мотора не причём, да и сам мотор тоже. Это наведённое напряжение от БП, совершающего работу. Корпус базы конечно просторный, но места всё равно недостаточно, чтобы убрать провода куда-то в другое место. Я пробовал приподнять БП и сдвинуть его в сторону, не помогло. Значит поле достаточно большое. Кажется предстоит новая переделка базы. Эхх, а я уже собрался прокатиться на этой страховидле((

-
После сборки получилось нечто очень страшное. И это несмотря на то, что крепления я нарисовал в САПР и распечатал на принтере... Но пользоваться им пока нельзя. Кнопок ещё нет, передачи не переключишь. А показания с энкодера считываются лишь до тех пор, пока выключен электромотор. Показания с педалей тоже считываются, всё хорошо. Стоит на мотор подать питание, как энкодер показывает крайнее правое положение. Ну или левое, по всякому бывает. Мотор при этом около минуты вращается в одну сторону, затем начинает вращаться в другую. Контакты BTS задействовал LPWM,RPWM,R_EN,L_EN,VCC,GND. И так до бесконечности... Device Setup: PWM (H-Bridge) 8.2 Khz CPR 12000 Analog Axes RX, RY Эксперименты продолжаются.
-
Нашёл умного мужика, он показал какие выводы соединять (BOOT0 и 3V). Напишу руководство по утилите DfuSe с картинками, если будет не лень. Сильно сократит время на поиски инфы для таких новичков как я. Плата прошита, отлично. Колхозим дальше. Так, энкодер ни в какую не работал на ардуино с прошивкой Ebolz Magy, посмотрим как он поведёт себя на этой плате. Успех. Прошивка микроконтроллера MMos_FW_0.99.2 прекрасно справилась с задачей. Показания с энкодера принтера HP считываются. Теперь надо научиться делать матрицы из кнопок, ибо КПП на отдельной плате Arduino Pro Micro временное решение. Запихать всё это внутрь корпуса и наконец придумать способ затянуть эти проклятые винты. У меня от проскальзывания винтов уже борозды появились на оси. Натяжения хватает не надолго, винты разбалтываются((
-
@Buxou привет. Возникли проблемы на стационарном компе. Выручил нетбук. На нём прошивка прошла без проблем с первой попытки. Мне приехала плата STM32_F4VE. И вот тут начинается самое интересное. Я не знаю как её прошить)) На плате есть разъём microusb, догадываюсь что это возможно сделать через него. Однако по запросу "прошивка STM32 F4XX" на меня выливается целый океан информации. Нашёл две версии ST-Link, затем STM32_HID bootloader. Потом случайно выяснил что для прошивки других STM нужны особые платы, через которые прошивки и заливаются. Возможно не мой случай, но подозрения закрадываются, ибо после установки ST-Link устройство не опозналось компом. Искал отдельно драйверы, поставил, тот же результат. Попробовал три разных провода для теста. Варианта два: брак платы; я что-то делаю не так. Расследование продолжается...
-
Боюсь название я уже не поправлю в теме. Забей. Ну так что, господа. Вы похвастались более дешёвыми энкодерами. Какой заказать? Тест энкодера DFGT показал значение 3200 cpr. Его можно взять за эталонный.
-
Проверить всё равно было не на чем. На столе же он (энкодер) не лежал в момент заказа с китая, правильно? Не лежал. Брал то, в чём уверен. Движок не смущает. Солидная мощность. Электросамокат с таким двигателем в состоянии сдвинуть с места взрослого человека. Я уже покатался с этим движком на прошивке Ai Wave. Это уже кое что после DFGT)) Кстати заказ с энкодером ещё не обработан, так что если скажете какие ещё точно будут работать за меньшие деньги, попробую какой-то из них заказать.
-
Я не стал испытывать прошивку на работу с неизвестными энкодерами. Гарантий нет, совместимого списка тоже. Один уже не работает с прошивкой EMC (от моего принтера). Про CWZ6 знаю из видео что работает, потому и купил. Ну и плюс плата теперь будет другая. Потому что я уверен что STM32 будет работать с этим энкодером. Исходя из того же видео.
-
@FIDENZIO Внешне энкодер похож на тот, который я заказал. Разрешение немного меньше. Калиброваться будет, разумеется. Про индексную метку рассказал автор самодельного руля, собранного с точностью промышленного станка. Собственно его решение я взял за эталонное. Рекомендую к ознакомлению: Изходя из видео я сделал вывод, что без метки энкодер вынудит тебя выставлять руль в центр при каждом запуске. Я проверять не стал, купил сразу идентичный.
-
@FIDENZIO Нет уверенности что в этом энкодере присутствует индексная метка. А она нужна для калибровки.
-
Rezinoviy_Ded изменил фотографию своего профиля
-
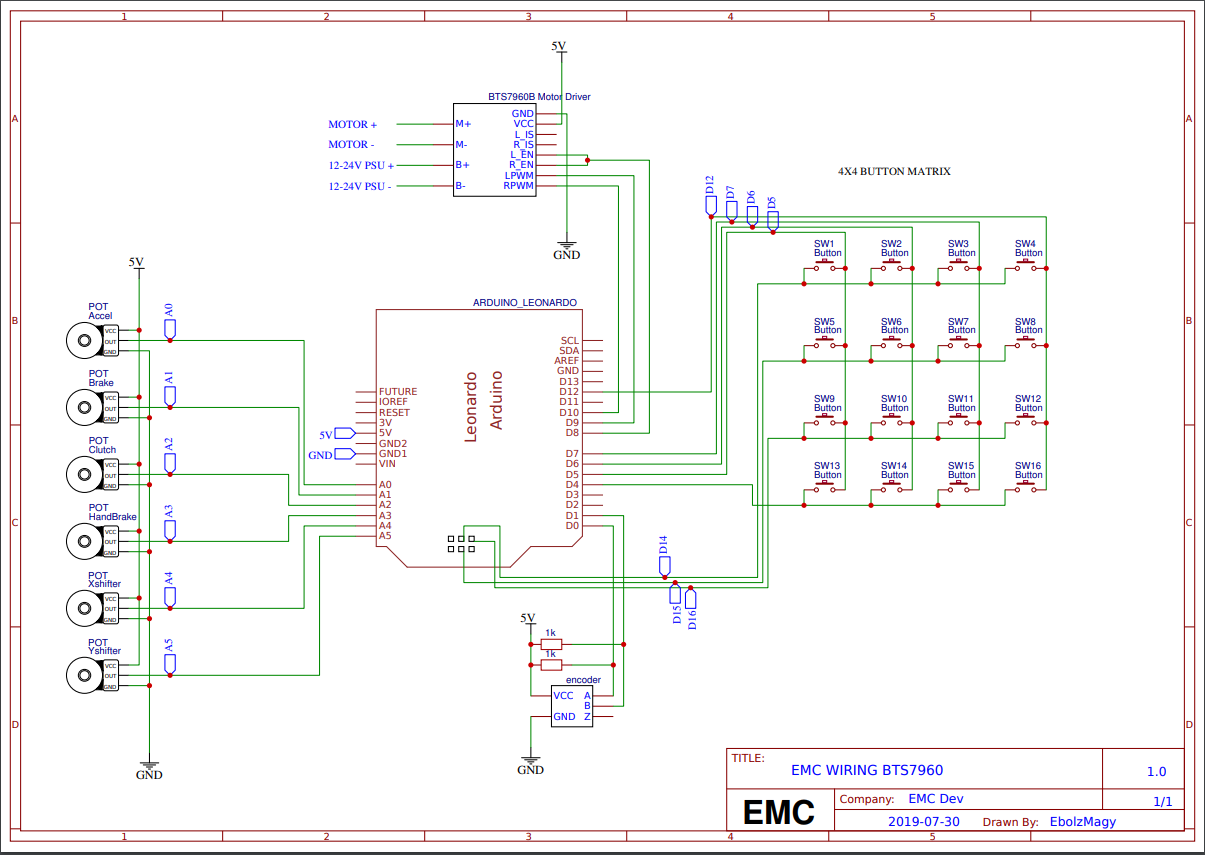
И так, в ходе тестирования прошивки EMC выявлена следующая проблема. Если подключать к плате энкодер от руля DFGT, показания считываются, утилита показывает градус, на который был повёрнут руль. Т.е. с платой всё в порядке, прошивка так же работает. Если подключить к плате энкодер от принтера HP DeskJet 970 Cxi, показания считываются только на прошивке Ai Wave. На прошивке EMC использование этого энкодера становится невозможным. Будьте внимательны при выборе комплектующих для сборки. Во избежание дальнейших проблем, вызванных неизвестным уровнем совместимости ПО и аппаратных модулей, с китая был заказан комплект: энкодер OMRON CWZ6C и плата STM32F407VET6. Выбор основывается на рекомендациях Caravangoes по выбору комплектующих и ПО для них. На этот раз всё должно заработать.
-
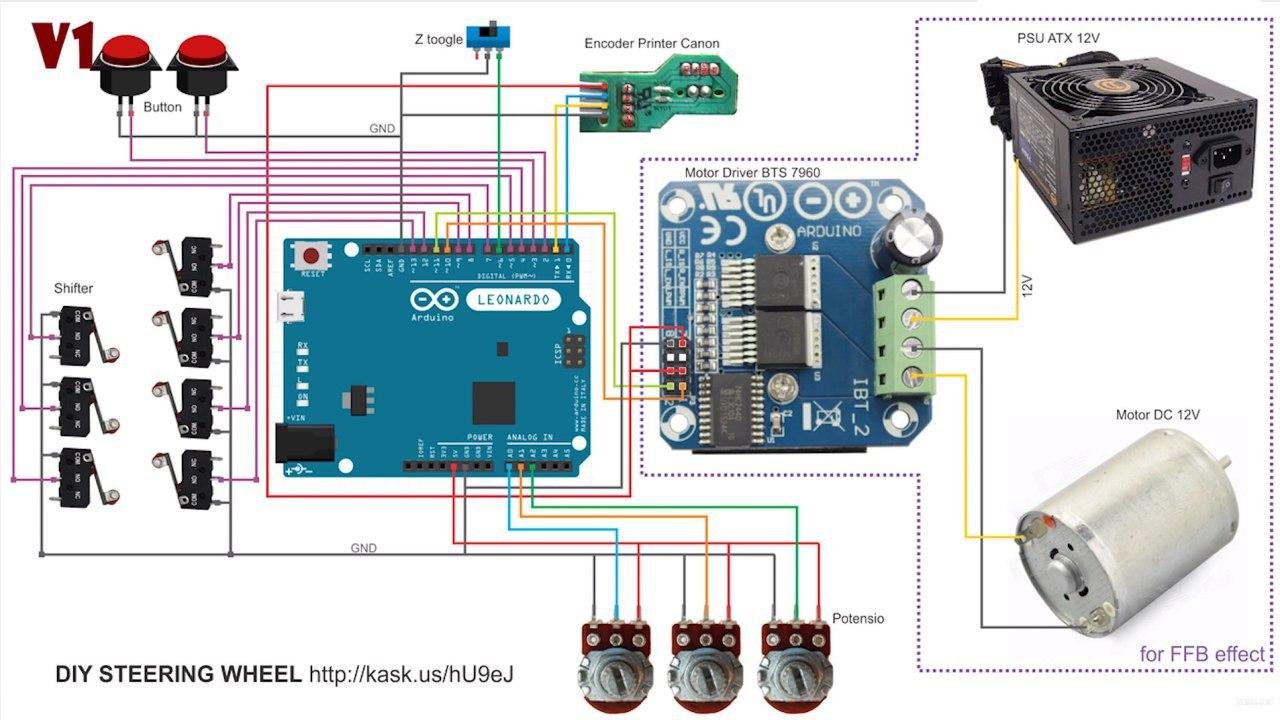
@Sieben отличие в них и заключается. В резисторах. Хотя я пробовал и с ними и без них. На схеме для WheelConfig их не было, энкодер принтера подключался без них к контактам 0 и 1. В принципе логично, ибо на самом энкодере они и так есть с завода. Ну и BTS7960b был подключен пинами VCC, L_EN, R_EN к линии 5V, а у EbolzMagy L_EN, R_EN подключаются к 8 контакту на Arduino Leonardo. Я попробовал и так и эдак. Отличия на скриншотах: