Ruvin
-
Постов
105 -
Зарегистрирован
-
Посещение
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент Ruvin
-
А вот вопрос) Можно удлинить дерековский регулятор Load Cell, что-бы к примеру расположить его около руля? Или сигнал от потенциометра будет нестабильным?
-
Ну да, но хоть что-то. Ну да, но хоть что-то.
-
Какой-то ориентир, от чего можно отталкиваться, при перенастройке. То-есть, условно, меньше 3 малозаметно, больше 6 неудобно, ищем золотую середину)))
-
Отредактировал и дополнил первое сообщение, теперь можно ориентироваться по нему.
- 51 ответ
-
- 2
-

-
- camera for AC
- RHMAC
- (и ещё 3 )
-
Я конкретно о твоих (ну и некоторых других , в том числе на офф форуме) впечатлениях о грядущем Project Cars ))) Купил РС, жду выхода, но если они его так и не доведут до ума... Честно говоря я и не надеялся на что-то кардинально хардкорное, но хотя-бы интересная карьера и хороший фидбек - это то, чего мне нужно от полусима. Я рассчитывал на что-то вроде грида, с интересными заданиями, и хорошими ботами, ну и плюс вменяемая физика и отдача. Именно вменяемые, пусть и с некоторыми упрощениями. Как более лёгкая альтернатива АС. Возможно так и будет. Но пока могу судить только по отзывам))) А РФ2 понравился именно как полноценный симулятор, для разнообразия, да и некоторые авто мне там больше по душе. Тот-же Lotus49... На торрентах вполне рабочая версия, да и онлайн я не катаю, и в ближайшее время вряд-ли буду. Но после покупки АС и РС, пользоваться РФ2, и не платить за него как-то не хочется)) Пиратка сейчас установлена, но играть в неё не тянет. Нужна лицензия)))
-
В связи с негативными отзывами о последних билдах РС (хотя я и не особо надеялся), и хороших впечатлениях о торрент версиях RF2, хотелось бы узнать - а Стим версия предвидится? Где-то встречал упоминание, что собираются выложить, но когда? Есть новости по этому поводу? Или купить сейчас, и не ждать, как правило, более демократичной цены в Стим?
-
В общем покатал с полчаса. Больше времени к сожалению не было. Серьёзно проанализировать сегодня конечно проблематично, как раз ножная тренировка была. Но на моё взгляд, приложение из разряда "маст хэв". Не мешает точно, а вернее даже помогает. Отлично повышает дисциплину торможения, наглядно указывая на ошибки. Что способствует более эффективному торможению. Единственно, как я и ожидал, когда заходишь в крутой поворот, и дотормаживаешь до апекса, всё внимание сосредоточено как раз на нём. То-есть, к примеру, на правой части экрана. Соответственно контроль "приборов" только краем глаза. И вот тут разница между оранжевым и желтым уровнем не воспринимается никак. Красный определяется, не слишком явно, но достаточно. Может, как вариант, сделать оранжевый уровень- красным, а блокировку как раз выделять стробоскопом? Я тут просто подумал- если начнёт мигать на оранжевом, должно будет мигать и на красном... Эффекта действительно может быть многовато. Хотя попробовать бы и так, кто знает...
-
Ну я к тому, что на светофоре не такая динамичная ситуация, а вот дотормаживаю я зачастую уже в повороте) Может опыта маловато (что скорее всего), но мне пока сложно одновременно и следить за траекторией, и за показаниями аппсов. Сужу по приложениям типа OV1 Info, там именно мигающая передача привлекает быстрее. Но конечно ты прав, надо погонять аппс, вполне возможно что моё предложение будет лишним. Просто хотел первым выразить свои "умные мысли", и развеять твои сомнения))) Хотя вполне возможно, что получилось наоборот)
-
На светофоре я смотрю на светофор))) А при подходе и в повороте на траекторию. Ну вообще смотри, тебе виднее, я пока просто теоретизирую, если успею сегодня покатать, отпишусь.
-
За цветом прямоугольников следить сложнее, а вот за тем, не возникла ли анимация- проще. Те-же лед тахометры не зря начинают мигать при оптимальных оборотах, это значительно больше привлекает внимание. Только надо делать так, как предложил GranDoxin, то-есть мигание по достижении оранжевого уровня. По остальным предложениям согласен, да и они были так, для массовки)))
-
Круто! Надо попробовать. Как вариант, может добавить мигание прямоугольника при блокировке? То-есть выше 80% цвет красный и начинает мигать. Зрительно, краем глаза, проще будет заметить. Ну а если уж совсем пофантазировать))) Индикатор смещения массы авто, что-то вроде ползунка, как на старых медицинских весах, и то-же отмечающий критическое отклонение цветом , или наклоном ( ну как индикатор горизонта, только совсем небольшой угол). То-есть , к примеру, при центральном баллансе ползунок посередине, цвета с обоих сторон полупрозрачные, при сдвиге в одну из сторон, она постепенно окрашивается во все более яркие цвета, и возможно даже чуть наклоняется в сторону критического смещения. Ну и полоска степени нажатия тормоза. Та, что по дефолту, уж больно маленькая, а тут все в одном месте, и желательно покрупнее)) Ну это так, предложения на вскидку, авось чего и сгодится)
-
 В свете разговоров о "правильном фов", задумался о изготовлении трекира. И наткнулся на инерционный. База arduino, плюс датчик положения. По цене выходит то-же, но для симрейсинга вроде как поинтересней- нет нагрузки на проц, плавность, быстрый отклик. Но проблема в том, что работает инерционник только с FaceTrackNoir, у которого в списке совместимости нет Корсы и Пкарса. Кто нибудь знает как решить проблему?))) Эмуляция какая, или уже появились плагины для arduino у альтернатив, типа FreeTrack ?
В свете разговоров о "правильном фов", задумался о изготовлении трекира. И наткнулся на инерционный. База arduino, плюс датчик положения. По цене выходит то-же, но для симрейсинга вроде как поинтересней- нет нагрузки на проц, плавность, быстрый отклик. Но проблема в том, что работает инерционник только с FaceTrackNoir, у которого в списке совместимости нет Корсы и Пкарса. Кто нибудь знает как решить проблему?))) Эмуляция какая, или уже появились плагины для arduino у альтернатив, типа FreeTrack ? -
Может мы о разном говорим? Я имел ввиду отклонение от fov, посчитанном на калькуляторе, по параметрам диагональ-расстояние до глаз. Невозможно сделать торпедо реального размера, на дисплее 19", соответственно что-бы там не насчитал калькулятор, выставить это будет проблематично. А значит придётся прибавлять к значению выданному калькулятром. Я лично настраивал так, что-бы воспринимать виртуальную ось (правда тогда об этом не задумывался). P.S. Может я и не прав, может уже туплю. Какой день без отдыха до 11-ти работаю... Завтра высплюсь, и внимательно прочитаю, чего я за последние дни понаписал)))
-
Это телевизор))) Просто тв я вообще не смотрю, ни на нем, ни на других телевизорах. Поэтому и обозвал монитором, т.к. по другому он использоваться не будет. Но это всё мелочи. Всё же в своем сообщении, я ориентировался на дисплеи +- 27 дюймов. И прибавка к реальному фов будет тем больше, чем меньше экран. Однако на своем 19' квадрате я в итоге получал ту-же картинку, к которой пришел на 32'. То-есть позиционирование в авто было аналогичным, видно левое зеркало, и надрулевая часть . Фов был гораздо больше, однако в то время я с этим не заморачивался. Возможно сейчас настроил бы по другому. Но врядли бы кардинально. Хотя если найду время, поэсперементирую))
-
У меня так и вышло) Монитор сразу за базой руля, нижний край матрицы упирается в верхний край t500rs. Даже кусок паролона пришлось подложить, что-бы экран не продавить. Кстати раньше, на квадратном 19' , у меня фов был в районе 54-56. При том-же расстоянии до глаз.
-
Если говорить о реальном фов - его можно представить рамой от картины, закрытой по периметру, к примеру картоном и выставленной перед вами. Вы видите только то что внутри рамы, и ничего вокруг неё. Чем ближе она к вам - тем поле зрения шире, то-же и с её размером. Однако в реальности мы имеем объёмное зрение, и можем заглянуть внутрь рамы, сместив угол зрения, или даже засунув голову внутрь неё))) В игре мы смотрим на мир через коробку без дна и крышки, относительно жестко закрепленную на голове. Этот эффект тем меньше, чем больше или ближе дисплей, и естественно уменьшаеться при использовании триппла. Однако, пока-что присутствует даже в VR. Любое изменение fov от реального в игре, приводит к установке "линз". При положительном изменении, мы как будто устанавливаем огромный дверной глазок на нашу виртуальную раму (коробку). Чем больше изменение, тем дальше кажутся объекты, пространство "растягивается". Смотря через глазок, нам кажется что до предмета условный метр, тогда как на самом деле 50 сантиметров))) Это верно для реального пространства, верно и для игрового. Но при увеличении фов скорость машины не меняется, тогда как расстояние визуально удлинняеться. Плюс искусственное увеличение бокового зрения. Отсюда и мнимое улучшение восприятия скорости. Авто проходит то-же расстояние, с той-же скоростью и за то-же время. Но кажется будто вы преодолели не 20 метров, а к примеру 25, или все 30. Естественно, что в "дверной глазок" мы видим больше деталей окружающего мира без смещения взгляда. И естественно что смещение оси виртуального взгляда более наглядно. Это по сути, и плюс сам кокпит, дают больше информации о положении авто и его смещении. Чем длиннее эта ось, тем более явная ориентация в виртуальном пространстве. До определённого предела, понятно. Установка монитора сразу за баранкой, над базой нарушает правильное ведение взгляда. Руль уходит из поля зрения, кокпит почти не видно, или центр взгляда смещается. Сейчас монитор у меня установлен сразу за базой, и частично перекрывается ей. В таком варианте взгляд ведётся через руль, захватывая его верхнюю часть краем глаз. Однако даже при такой установке реальный фов сильно урезает визуальную информацию. Это особенно заметно на одномониторной системе. И дело даже не в деталях окружающего мира, не в том что я не вижу поворот перед авто. На поворот, что я прохожу сейчас, я смотрел с предыдущего. Когда я на прямой подхожу к медленному повороту, я смотрю не на апекс, а на точку выхода. Со шпильки сложнее, но тут надо либо перенастраивать RealHeadMotion , либо покупать трекир, либо вообще апгрейдиться до триппла))) Основная проблема реального fov это отсутствие ощущения смещения авто. Я уже приводил пример с линейкой- сравните ощущения при повороте туловища "на легке", а затем возьмите в руки какой-нибудь длинный предмет(трубку или линейку), и уприте перпендикулярно телу. Теперь снова повернитесь- вращение стало гораздо нагляднее, ведя взгляд вдоль предмета, вы гораздо точнее оцениваете своё положение. Именно такой виртуальной оси и не хватает в калькуляторных фов. А учитывая и так малое количество информации поступающей к нам из сима, наличие такой оси становиться критической проблемой восприятия движения и положения. Особенно для неопытных пилотов, или водителей визуалов, больше чем другие опирающихся на зрительную информацию , позволяющую отождествлять свой кокпит с виртуальным, интерпритируя информацию о полоположении боллида. С другой стороны, для иных гонщиков, лучше воспринимающих габариты авто при реальном фов, и соответственно лучше ощущая его положение имея возможность применить обыденную привычку управления машиной, калькуляторный градус может помочь добиться лушего времени. Тем более учитывая более правильное и привычное восприятие расстояния и пространства (да и скорости на самом деле) Собственно, к чему весь этот ликбез) Естественно, что восприятие виртуального угла остаётся весьма индивидуальным. Но общие моменты, влияющие на это, остаются. И я, как мог, их описал. И собственно к чему пришел я... Фов, посчитанный на сайте может, и должен служить отправной точкой для личных настроек. Для начала всё правильно замеряем, затем считаем, и выставляем на тестовой машине полученную цифру. Я предпочитаю кузов, с нецентральной посадкой- для меня так нагляднее. Затем отодвигаем виртуальное сиденье максимально назад. И вот после этого, проехав предварительно пару кругов, начинаем увеличивать фов. Увеличиваем до тех пор, пока восприятие виртуальной оси ( смещение авто на треке) , не станет восприниматься достаточно хорошо, для наилучшего контроля. Скорее всего, в вашем поле зрения появиться левое боковое зеркало. Общее увеличение fov, до оптимального параметра, не должно превысить +10, в крайнем случае +15 от предварительно посчитанного. Ну это при условии правильного положения монитора, не в метре за баранкой))) И естественно на это здорово влияют физические размеры дисплея. Собственнно исходя из этого правила, мы и приходим к среднему значению 45 (+ - 5) , определённому GranDoxin выше. Мой реальный фов, с парамметрами кокпита- монитор 32 дюйма с расстоянием до него 70 см, посчитался как 32(АС). И он после настройки как раз и укладывается в вышеозначенную дельту. Что и требовалось доказать)))
-
В общем потестил я два фова.В Корсе. Один калькуляторный - 32, второй тот что рекомендовал GranDoxin, т.е. 45. Расстояния однозначно лучше чувствуются при 32, ширина полотна, точки входа, скорость подхода к повороту. Особенно расстояние до входа в поворот, точнее оцениваеться, лучше контролируется. Однако всё портит "носом в руль". Невозможно подвинуть сиденье в авто так, что-бы видеть кокпит. Соответственно общее ощущение скорости хуже. При 45 лучше ощущаются не только сама скорость, но и поперечное смещение, загрузка подвески, угол захода в поворот, снос. В основном, это происходит, как мне кажется, благодаря положению внутри кабины- чем больше видно кокпит, тем лучше понимаешь положение авто в пространстве. Это как с линейкой перед носом- поворот головы сразу становится нагляднее. Но расстояние искусственно увеличивается, полотно (и весь мир ) как-будто растягивается. Подходишь к повороту, кажется до него далеко, но приближаешься гораздо резче чем оцениваешь. Ну к этому быстро привыкаешь, мне хватает пол круга (правда я езжу не на пределе, так-что моя скорость адаптации не показатель). Итого... Идеальным, как мне кажется вариантом был-бы фов 32(для моего кокпита, где дисплей 32 дюйма, и расстояние до экрана 70 см), при отодвинутом от торпедо виртуальном сиденье. Не уверен, правда, что вышло бы то-же самое, но всё-таки фов определяет градус обзора, на сколько я понимаю, а не положение в кабине. Хотя эффект наверно будет всё-же не тот... На стабильность, кстати у меня фов особо не повлиял. Как вылетал с трассы так и вылетаю))) В общем, если кратко, то малый фов улучшает восприятие трассы (её физические размеры, расстояния), средний - авто(смещение, скорость). В итоге, у пилотов, которые и так хорошо чувствуют автомобиль, меньший фов может привести к улучшению показателей, за счёт более точного позиционирования на треке. Однако тут вылезает проблема малого обзора... Сорокапятиградусный же fov позволяет лучше контролировать само авто, понимать что с ним происходит, а учитывая и так малое количество инфы в симах... В общем всё зависит от талантов)))
-
Кто нибудь может точно сказать, за что отвечает Minimum Force ? За плотность центра руля, если там фитбека не хватает? На максе просто долбит в стороны...
-
Будет очень интересно, если сделаете поддержку батткикера. Куплю программу с удовольствием (сам девайс уже есть, а вот с накидкой не срослось). Ну, если поддержка АС и Пкарс будет)))
-
Правильно настроить, и будет трясти как в шифте))) : http://forum.simracing.su/index.php?showtopic=1792&st=20#entry128631 Хотя эта вся тряска и для фана, но иногда даёт чуть больше информации о полотне. Хотя возможно и иллюзия... Но гонять веселее определённо))
-
В общем записал видео как мог... Скрин моих настроек: Пара видео:

- 51 ответ
-
- 1
-
-
- camera for AC
- RHMAC
- (и ещё 3 )
-
Проверь файл RealHeadMotionSettings.xml . Открой блокнотом, и сверь настройки в нем, с теми, что у тебя в RealHeadMotionAssettoCorsa.exe. Должны совпадать (только некоторые значения не имеют целого числа). В конце файла, должны быть похожие строчки: <Action Name="LookLeft" Device="Thrustmaster T500 RS Racing wheel" Channel="Point of View Hat 1Left" Sign="1" IdleVal="0" Smooth="0" DeadZone="0"/> <Action Name="LookRight" Device="Thrustmaster T500 RS Racing wheel" Channel="Point of View Hat 1Right" Sign="1" IdleVal="0" Smooth="0" DeadZone="0"/> <Action Name="LookLeftShoulder" Device="Thrustmaster T500 RS Racing wheel" Channel="Button 4" Sign="1" IdleVal="0" Smooth="0" DeadZone="0"/> <Action Name="LookRightShoulder" Device="Thrustmaster T500 RS Racing wheel" Channel="Button 5" Sign="1" IdleVal="0" Smooth="0" DeadZone="0"/> <Action Name="LookUp" Device="Thrustmaster T500 RS Racing wheel" Channel="Point of View Hat 1Up" Sign="1" IdleVal="0" Smooth="0" DeadZone="0"/> <Action Name="LookDown" Device="Thrustmaster T500 RS Racing wheel" Channel="Point of View Hat 1Down" Sign="1" IdleVal="0" Smooth="0" DeadZone="0"/> </RealHeadMotion> Где Device - твоё устройство, Channel - наименование кнопки/оси. Попробуй настроить через файл, с незапущенным экзешником. Либо настрой как обычно и закрой прогу. Сохрани документ (и сделай копию), а потом снова запусти RealHeadMotionAssettoCorsa.exe. Попробуй в игре. Если и на этот раз будет сбрасывать оси, задай файлу RealHeadMotionSettings.xml атрибут "только чтение", не забыв перед этим всё настроить по своему вкусу. Это должно помочь. Правда, если захочешь перенастроить эффекты через экзешник, придётся временно снимать атрибут, зато кнопки будет помнить наверняка.
- 51 ответ
-
- 1
-
-
- camera for AC
- RHMAC
- (и ещё 3 )
-
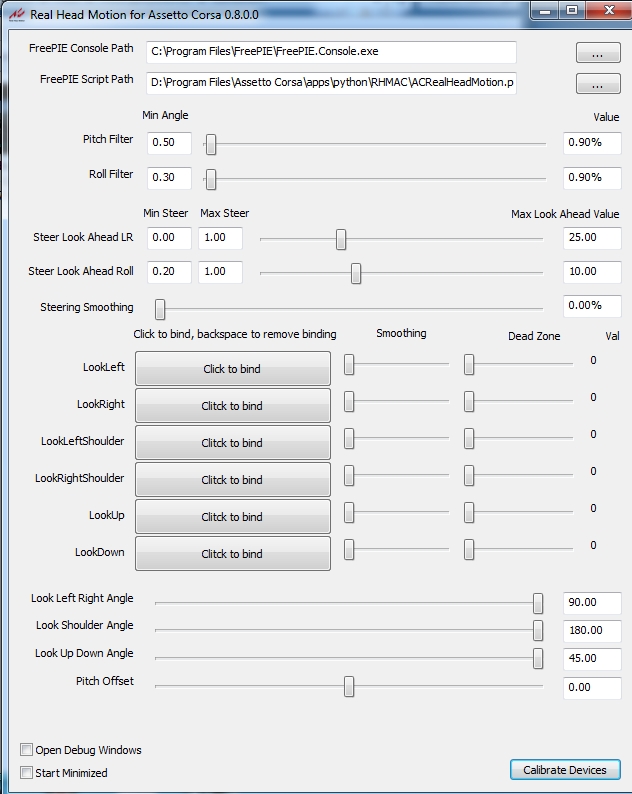
В общем, доработал инструкцию. Кое-где ошибался, кое-что дополнил. Теперь вариант окончательный. ПРОСЬБА администратору отредактировать первое сообщение на исправленный вариант. Или дать права мне))) Ссылка на комплект(с дефолтными настройками) RHMAC+инструкция+FreePIE.1.5.0.0+vcredist_x64: https://yadi.sk/d/x1P6zFN1dMejx Исправленная инструкция: Для установки RealHeadMotion for AssettoCorsa, необходимо распаковать папку RHMAC)) Далее скачиваем программу FreePIE.1.5.0.0 (есть на официальном сайте RealHeadMotion), и устанавливаем её. Заходим в папку RHMAC, и запускаем RealHeadMotionAssettoCorsa.exe. В самой верхней строчке находим путь к экзешнику FreePIE, должно выглядеть примерно так: C:\Program Files\FreePIE\FreePIE.Console.exe Далее, во второй строчке находим конфигурационный файл скрипта, в папке RHMAC: C:\Documents and Settings\User\downloading\RHMAC\ACRealHeadMotion.py Жмём снизу Calibrate Devices (вообще, она нажимается после любых изменений). После этого можно запускать игру. В самой игре так-же необходимы правильные настройки. Для начала заходим в вкладку Вид(View), и отключаем(или сбавляем на минимум, хотя я для чистой настройки отключил, плюс у меня с включенными g-forse игра тупила, а RealHeadMotion не работал) все G-forse эффекты, а так-же тряску камеры(следующий параметр, сразу за G-forse). Можно приступать к настройке RealHeadMotion. Для этого запускаем Практику ( рекомендую опенвилл и что-нибудь с высокой мягкой подвеской- легче и нагляднее настраивать,), как окажетесь в машине жмём кнопку Домой(возврат к Винде), запуститься отладочная копия АС. 1)Pith Filter Настройки камеры, относительно которой отыгрываются спецэффекты. Min Angle- Настройка соотношения "горизонта" и "глаз" в отработке эффектов. Чем больше значение, тем меньше стабилизирующего участия глаз. Максимум 1.00, при этом значении, камера в АС становиться похожа на записи с GoPro. Оптимально 0.3-0.7. Value- Настройка соотношения участия(преобладания) "горизонта" и "головы" в отработке эффектов. Меньше 1 - голова почти неподвижна(относительно дисплея), смещается горизонт(отрабатывается тряска, торможение, нырок, и т.д.). Соответственно чем больше значение, тем более стабилен горизонт и больше смещается голова. Оптимально от 1 до 10. 2)Roll Filter- Регулировка крена камеры. Min Angle- Так-же как и в Pith Filter настраивает стабилизирующею функцию глаз.Чем больше значение, тем более жесткая фиксация глаз относительно головы. Максимум 1.00. Оптимально 0.3-0.7. Value- Чем меньше значение, тем больше крен горизонта относительно головы (голова относительно дисплея остаётся малоподвижной). При значении меньше 1, голова практически неподвижна, при наезде колёсами на бордюр одной стороной, тогда как горизонт наклоняется. То-есть меняется тип вращения - либо голова относительно горизонта (значение больше), либо горизонт относительно головы (значение меньше). Оптимально от 1 до 10. 3)Steer Look Ahead LR- Ведение взгляда вдоль линии поворота колёс (поворот головы вслед за рулём). Min Steer - Мертвая зона, позволяет настроить нечувствительность при малом подруливании. Оптимально от 0.01 до 0.05, ещё лучше 0.00, так плавнее. Если ставить больше, ведение взгляда, при переходе с "мертвой точки",становиться дерганным, в повороте можно принять за срыв оси, сильно дезориентирует. Однако при значении 0, даже при малом подруливании, камера слегка дергается. ВНИМАНИЕ! После ручных изменений в колонках Min-Max, Value необходимо нажать Enter, когда курсор находиться в конце строки(если строчки горят красным). Max Steer - Мертвая зона, работает в конце руления. В общем и целом, всё это работает, приблизительно в процентном соотношении. То-есть, если Min Steer 0.10, а Max Steer 0.70, то первые 10% и последние 30% вращения руля голова не поворачивается. Лично я предпочитаю линейную зависимость- по причине описанной выше. Max Look Ahead Value- Линейность взгляда относительно колёс. При значении 25 примерно совпадает с линией направления поворота колёс, больше-меньше регулирует чувствительность. К примеру, если поставить 75, голова будет значительно поворачиваться, даже при малом отклонении руля. 4)Steer Look Ahead Roll -Позволяет настраивать наклон головы в стороны при рулении, вслед за поворотом руля, и, возможно имитирует центробежную силу. Min Steer - Мертвая зона, если 0, то наклон сразу при повороте руля, если 0.80 то в конце полного оборота. Оптимум 0.20-0.50. Max Steer- Мертвая зона, работает в конце вращения руля. Max Look Ahead Value - Степень наклона головы (для фана достаточно 10, 5 оптимум) 5)Steering Smoothing- Глобальное сглаживание эффектов. 6)Настройки кнопок/осей для обзора. LookLeft/LookRight - посмотреть налево/направо, плюс настройки для осей (например для FreeTrack). LookLeftShoulder/RightShoulder посмотреть назад через левое/правое плечо, плюс настройки для осей (например для FreeTrack). LookUp/Down - посмотреть вверх/вниз,плюс настройки для осей (например для FreeTrack). Настройки осей: Smoothing- фильтр малых отклонений, Dead Zone соответственно мертвая зона. Настройки углов для кнопок/осей обзора: Look Left Right Angle- Максимальный угол поворота головы влево-вправо. Look Shoulder Angle- Максимальный угол для поворота головы и туловища(посмотреть назад). Look Up Down Angle- Максимальный угол поворота головы вверх-вниз. Pith Offset Фиксированное отклонение взгляда вверх-вниз. Аналог настройки из боковой панели АС.
- 51 ответ
-
- 2
-
-
- camera for AC
- RHMAC
- (и ещё 3 )
-
Кнопка в самом нижнем, правом углу не запоминает?
-
Если завтра успею снять, то выложу. Пока даже не в курсе какую программу лучше использовать))