Лидеры




Популярный контент
Показан контент с высокой репутацией 12/09/19 в Сообщения
-
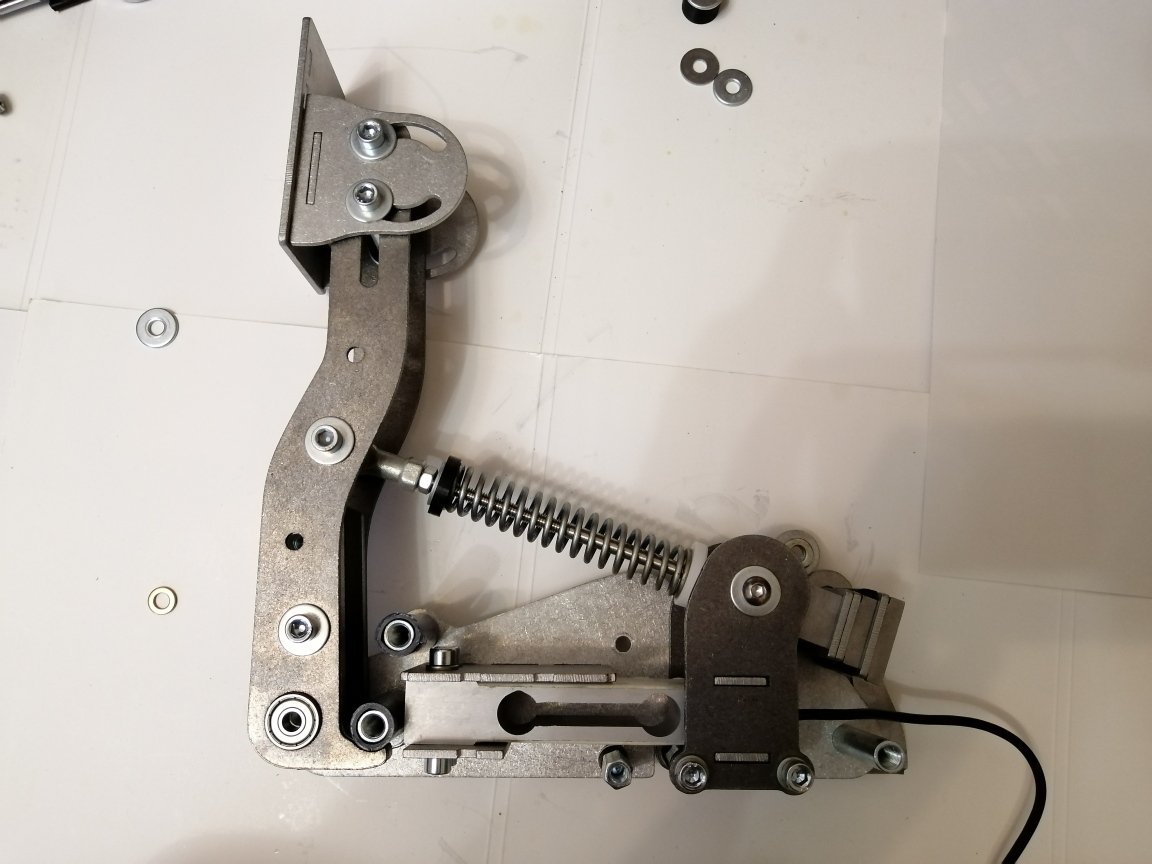
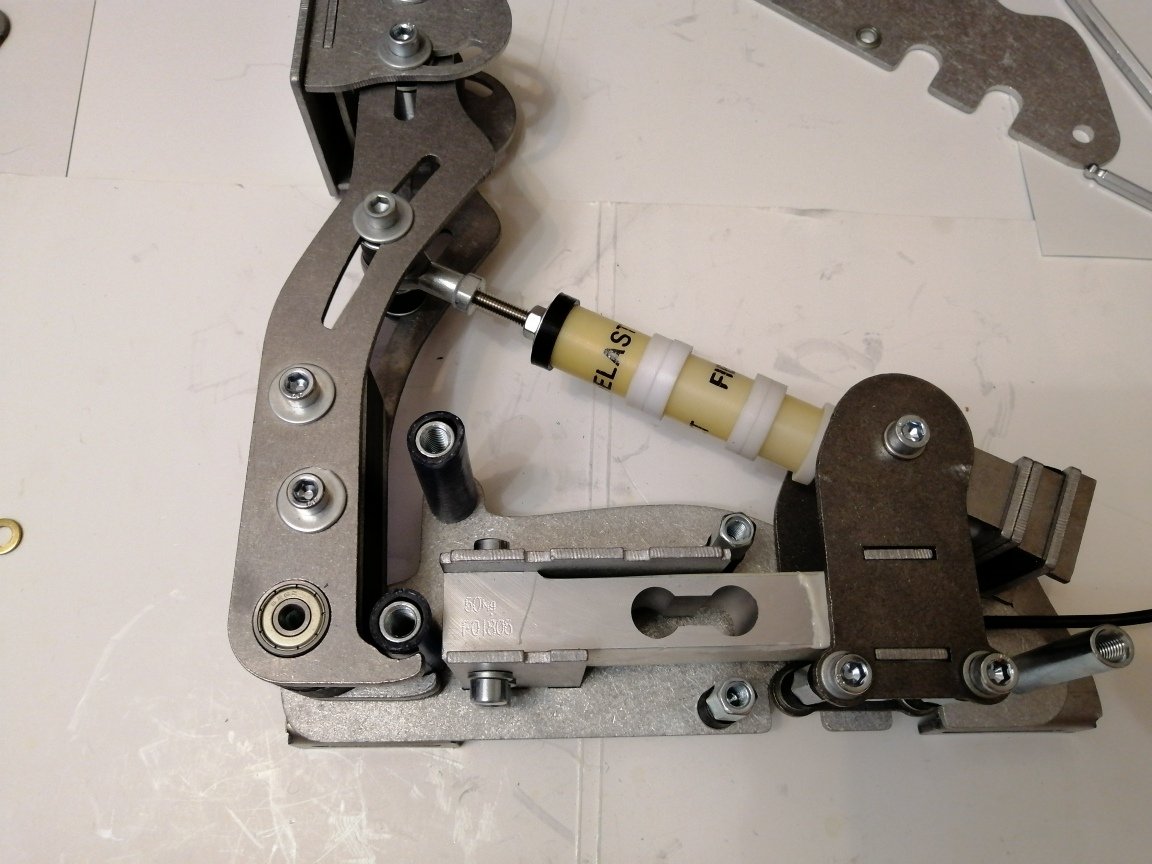
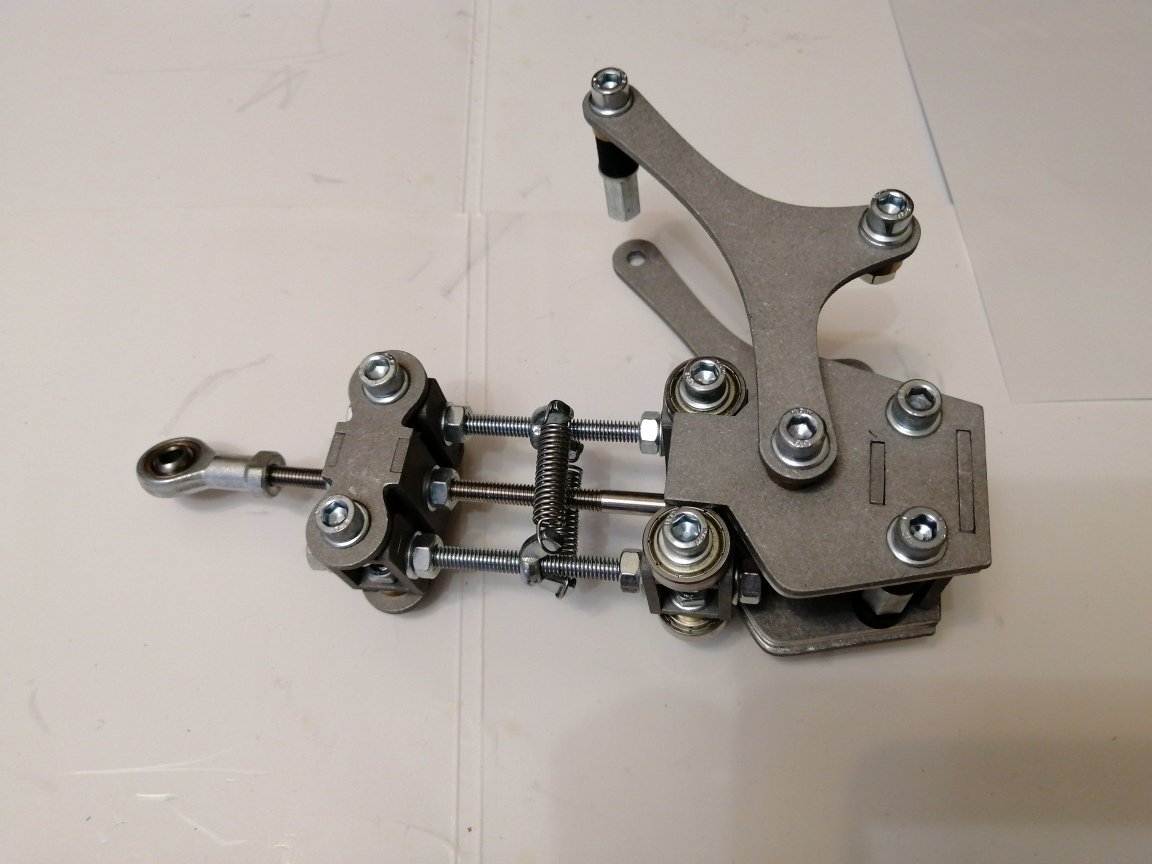
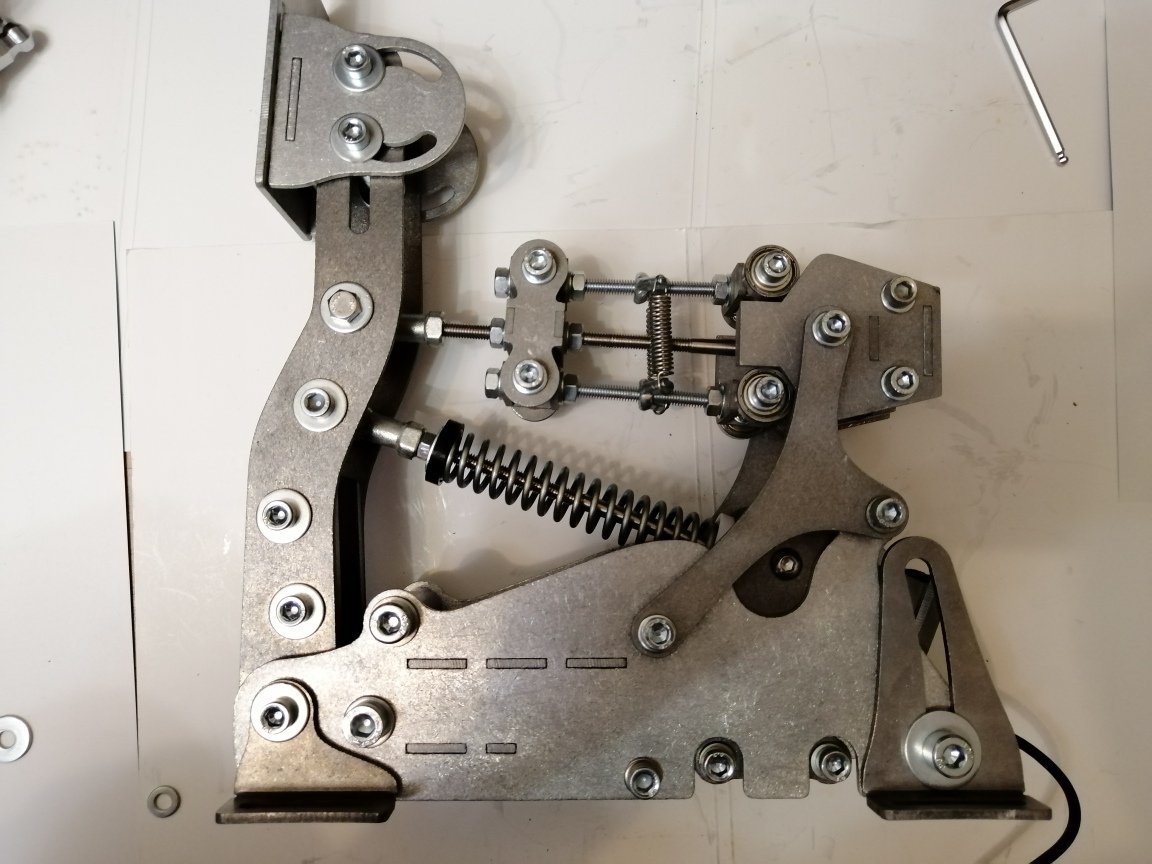
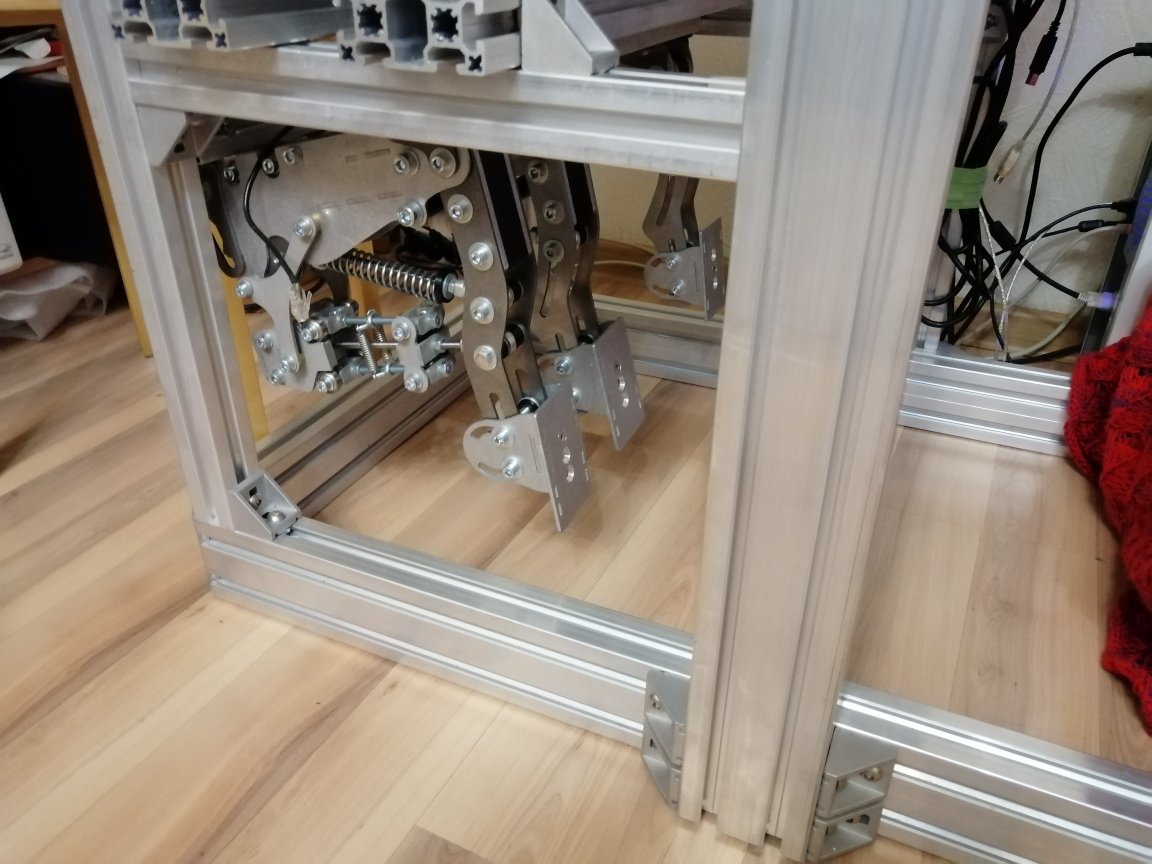
Напишу тоже кратенький "отзыв", по технической стороне вопроса (для адептов техносекты) Как известно, все 3 педали Андрея имеют LoadCell датчики. Выглядит это вот так: Соответственно никаких трущихся частей как в потенциометрах или трудности настройки как в холлах нет. По фотке видны упоры педали для обеих положений, можно прикинуть диапазон возможного хода. Для педали тормоза все аналогично, только вместо пружины - эластомеры (на фотке мои, покупал наверно еще лет 5 назад для своих самоделок). Датчик на 100кг На тормозе есть возможность регулировать силу нажатия стандартным образом - изменением высоты штока. По моим примерным оценкам, при минимальном усилии, когда шток максимально сдвинут вниз - чтобы выжать максимум 100кг датчика - нужно приложить чуть больше 20кг на площадку педали; при максимальном усилии - придется давить под 300кг. Ход педали зависит от жесткости эластомеров На главной оси стоят нормальные подшипники, поэтому нет проблемы появления люфтов из-за износа стенок как в НЕ ) Одна из фишек, которую я нигде больше не видел - возможность изменить наклон площадки (изменяется в очень больших пределах, по факту столько не требуется) ) Что меня поразило - это механизм сцепы. Это какое-то произведение искусства ) Вот так выглядит блок сцепы отдельно Я думаю, что принцип действие по фото понятен - нелинейность усилия достигается профилем в правой части, а величина усилия - расположением пружин. В результате эффект размыкания дисков хорошо выражен и без проблем настроить силу под себя Педалька в сборе довольно монструозно выглядит )) Ну и гибкость, которую дает такая конструкция отдельных педалей - тоже большой плюс. Я смонтировал их в инвертированном виде, какую-нибудь гидравлику так поставить вряд ли получилось бы из-за резервуаров.
 4 балла
4 балла -
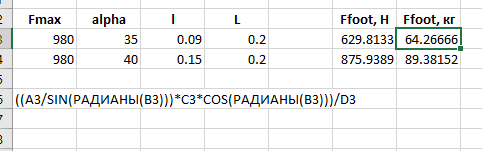
Сел рисовать силы, третий раз посчитал все, третий раз разный результат, ну что за фигня! )) Делал вот по такому расчету, если видите, что что-то не так - пишите, м.б. коллективными усилиями докопаемся до истины ) Поехали Разрисуем все что нужно для расчета Здесь у нас Ffoot - сила, приложенная ногой к площадке педали. Ее ищем Flev - сила, получающаяся после рычагов L, L1, L2 Flc - сила, действующая на датчик. Действует под углом a1 к Flev. К самому датчику также действует под углом a1 Fmax - вертикальная составляющая Flc Для простоты расчетов сделаем допущение, что педаль неподвижна (например установлены максимально жесткие пружины), иначе у нас все углы и рычаги будут динамически меняться при нажатии и расчет будет несколько сложнее )) 1. На площадку педали давит нога симрейсера с силой Ffoot. Нужно найти такую максимальную силу Ffoot, при которой 100 кг-вый датчик все еще не сломается. Подразумевается, что симрейсер достаточно суров и может давить с любой силой Полная длина педали - 20см, длина рычага L1 - 9см, длина рычага L2 - 14см Отсюда получаем, что в месте крепления штока после системы рычагов получаем силу Flev, выражая через нее Ffoot, имеем Ffoot=(Flev*L1)/L Для простоты считаем, что Ffoot перпендикулярна педали 2. Поскольку направление силы Flev не параллельно Flc (которая давит на датчик), а под углом a1, то Flev=Flc*cos(a1) Здесь для простоты принимаем, что Flev направлена параллельно датчику load cell 3. Flc в свою очередь не перпендикулярна датчику, поэтому нам нужно найти только вертикальную составляющую этой силы Fmax (так назвал только для обозначения макс силы, которую выдержит датчик) Flc=Fmax/sin(a1) 4. Подставляем все в п.1, получаем целевую формулу Ffoot=(Flev*L1)/L= (Flc*cos(a1)*L1)/L = ((Fmax/sin(a1))*cos(a1)*L1)/L Углы прикинул конечно не точно, примерно получаются 35 и 40 гр для одного и другого положения. В спеках по датчикам емкость указывается в кг, соответственно 100кг датчика будет 980Н, результат также получим в Ньютонах, для кг (чтобы сравнивать с другими) делим на 9,8 В итоге у меня получилось 64кг для нижнего положения и 89кг для верхнего ) Да уж, с прикинутыми вначале цифрами мало общего ))
2 балла
-
И какое это имеет отношение к «точности» и «контролю педали»? По сути весь смысл «больших усилий» сводится к тому, чтобы не хватало сил «продавить» весь диапазон — а это изрядно затрудняет контроль на высоких значениях (лапка то и так уже «трясётся от натуги»). С тем же успехом можно обрезать диапазон софтверно, что некоторые и делают.1 балл
-
Да, я не вижу смысла вдавливать тушку в кресло на каждом торможении, у меня падает точность торможения.1 балл



.jpeg.c8ee7695fe5686af0f9077d7a6bc23ed.jpeg)